Model: DLRB-934
Overview of the industrial robot typical workstation training system
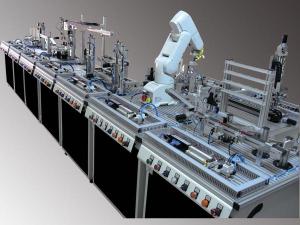
A typical industrial robot workstation equipment consists of a six-axis industrial robot, training platform, assembly tasks model, glue task model, tire palletizing model, testing arrangement model, material storage tank, double sucker fixture, glue guns clamps, parallel fixture, jaw fixtures, console, assembly tables and consumable kits. Industrial robots and assembly can be combined with task models, glue task models, tire palletizing models and test arrangement models to accomplish the respective tasks accordingly.
Parameters of the industrial robot typical workstation training system
Input power: single-phase three-wire AC220V ± 10% 50HZ,
Working environment: Temperature -10 ℃ - + 40 ℃, relative humidity <85% (25 ℃), no condensation Altitude <4000m
Power control: automatic air switch on/off power supply, overvoltage protection, under-voltage protection, over-current protection, leakage protection system.
Output Power:
(1) Single-phase AC 220V ± 10% 50HZ control output by start switch, and fuse protection.
(2) DC stabilized power supply: 24V / 1A,
Dimensions: 1300mm × 750mm × 1700mm
Training content
1. Industrial robot body and controller installation wiring
2. Industrial robots and initialization parameters recovery
3. Industrial robots and PLC IO communication
4. Industrial robots IO wiring
5. Industrial robots palletizing application installation and wiring
6. Application of industrial robots palletizing fixture selection and design
7. Industrial robots palletizing application programming and debugging
8. Industrial robots glue application installation and wiring
9. Application of industrial robots gluing fixture selection and design
10. Industrial robots glue application programming and debugging
11. Industrial robot installation and wiring assembly applications
12. Industrial robot assembly fixture selection and design applications
13. Industrial robot programming and debugging assembly applications
14. Industrial robots detect application installation and wiring arrangement
15. Arranged to detect the application of industrial robots fixture selection and design
16. Industrial robot detection arrangement application programming and debugging
17. Classification of industrial robots and design materials selected application
18. Classification of industrial robots warehousing application and design
19. Comprehensive application and design of industrial robots and peripherals.