Model: DLRB-2600
Overview
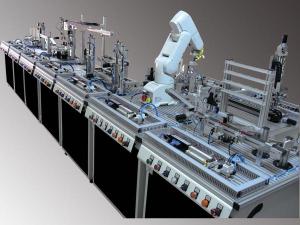
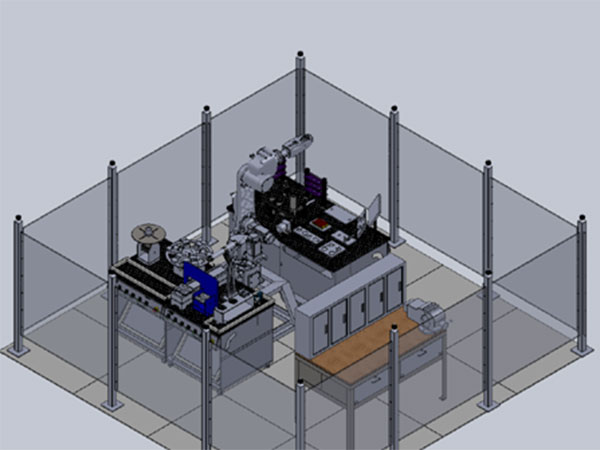
This robot polishing training system is designed to grind/polish/deburr workpieces (wheel hub surfaces and wheel PCD holes) after initial processing.
The robot uses composite grinding heads and an adaptable clamp for polishing and deburring.
Technical parameters of the robot polishing training system
Model number: DLRB-2600 (other brands are optional)
Wrist overweight: 12 kg
Axes: 6-axis
Maximum arm radius: 1.85m
Protection grade: IP67
Installation: ground installation
Positional repeatability: ±0.07mm
Power supply: 200-600V, 50/60Hz
Rated power: 4.5KVA
Training content
1. The basic principles and structure training of industrial robots
2. Understanding industrial robot structure
3. Understanding the electrical components of industrial robots
4. Understanding the industrial robot controller
5. Learning and training of joint motion control of the six DOF robot
6. linear trajectory control training of the six DOF robot
7. Circular arc trajectory control training of the six DOF robot
8. Acceleration and deceleration control training of the six DOF robot
9. basic operation of robot control training
10. The training of robot coordinate system application
11. Robot programming training
12. Principle and structure training of grinding and polishing components applied technology of grinding and polishing
13. Fixture design of polishing and polishing table